One-dimensional (1D) Damped Cosine Function#
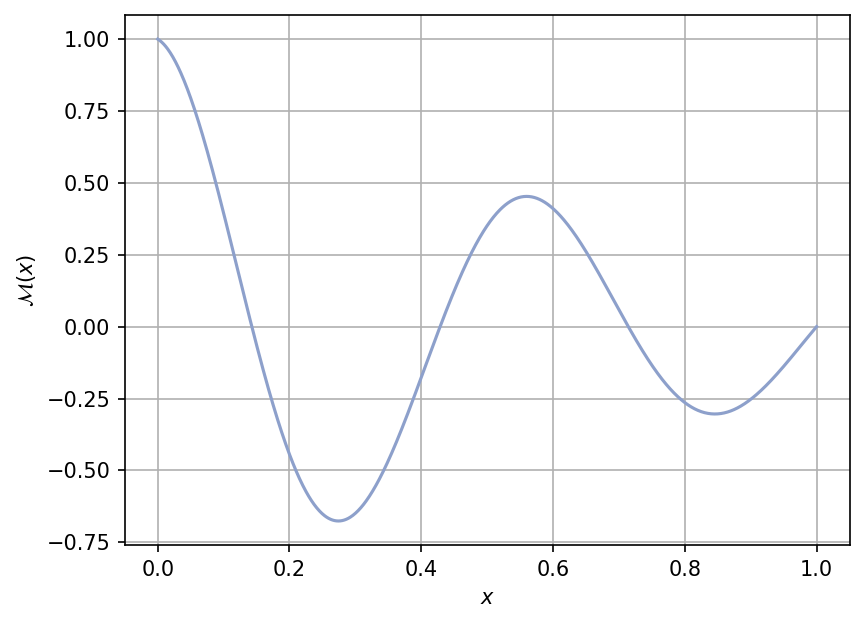
The 1D damped cosine function from Santner et al. [SWN18] is a scalar-valued test function for metamodeling exercises.
import numpy as np
import matplotlib.pyplot as plt
import uqtestfuns as uqtf
A plot of the function is shown below for \(x \in [0, 1]\).
Test function instance#
To create a default instance of the test function:
my_testfun = uqtf.DampedCosine()
Check if it has been correctly instantiated:
print(my_testfun)
Function ID : DampedCosine
Input Dimension : 1 (fixed)
Output Dimension : 1
Parameterized : False
Description : One-dimensional damped cosine from Santner et al. (2018)
Applications : metamodeling
Description#
The test function is analytically defined as follows[1]:
where \(x\) is defined below.
Probabilistic input#
Based on [SWN18], the domain of the function is in \([0, 1]\). In UQTestFuns, this domain can be represented as a probabilistic input model using the uniform distribution shown in the table below.
Show code cell source
print(my_testfun.prob_input)
Function ID : DampedCosine
Input ID : Santner2018
Input Dimension : 1
Description : Input model for the one-dimensional damped cosine from
Santner et al. (2018)
Marginals :
No. Name Distribution Parameters Description
----- ------ -------------- ------------ -------------
1 x uniform [0. 1.] -
Reference results#
This section provides several reference results of typical UQ analyses involving the test function.
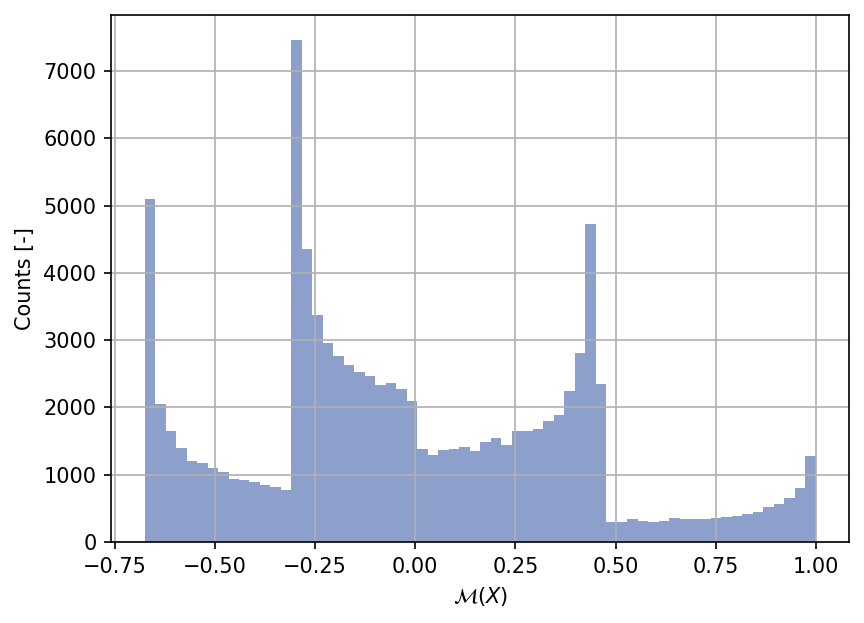
Sample histogram#
Shown below is the histogram of the output based on \(100'000\) random points:
Show code cell source
np.random.seed(42)
xx_test = my_testfun.prob_input.get_sample(100000)
yy_test = my_testfun(xx_test)
plt.hist(yy_test, bins="auto", color="#8da0cb");
plt.grid();
plt.ylabel("Counts [-]");
plt.xlabel("$\mathcal{M}(X)$");
plt.gcf().tight_layout(pad=3.0)
plt.gcf().set_dpi(150);
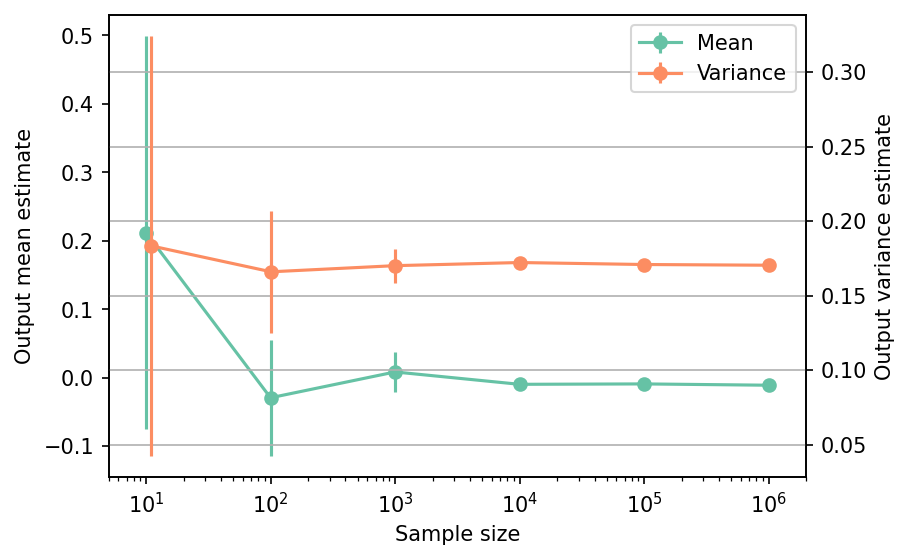
Moment estimations#
Shown below is the convergence of a direct Monte-Carlo estimation of the output mean and variance with increasing sample sizes.
Show code cell source
np.random.seed(42)
sample_sizes = np.array([1e1, 1e2, 1e3, 1e4, 1e5, 1e6], dtype=int)
mean_estimates = np.empty((len(sample_sizes), 50))
var_estimates = np.empty((len(sample_sizes), 50))
for i, sample_size in enumerate(sample_sizes):
for j in range(50):
xx_test = my_testfun.prob_input.get_sample(sample_size)
yy_test = my_testfun(xx_test)
mean_estimates[i, j] = np.mean(yy_test)
var_estimates[i, j] = np.var(yy_test)
# --- Compute the error associated with the estimates
mean_estimates_errors = np.std(mean_estimates, axis=1)
var_estimates_errors = np.std(var_estimates, axis=1)
# --- Plot the mean and variance estimates
fig, ax_1 = plt.subplots(figsize=(6,4))
# --- Mean plot
ax_1.errorbar(
sample_sizes,
mean_estimates[:,0],
yerr=2.0*mean_estimates_errors,
marker="o",
color="#66c2a5",
label="Mean"
)
ax_1.set_xlim([5, 2e6])
ax_1.set_xlabel("Sample size")
ax_1.set_ylabel("Output mean estimate")
ax_1.set_xscale("log");
ax_2 = ax_1.twinx()
# --- Variance plot
ax_2.errorbar(
sample_sizes+1,
var_estimates[:,0],
yerr=1.96*var_estimates_errors,
marker="o",
color="#fc8d62",
label="Variance",
)
ax_2.set_ylabel("Output variance estimate")
# Add the two plots together to have a common legend
ln_1, labels_1 = ax_1.get_legend_handles_labels()
ln_2, labels_2 = ax_2.get_legend_handles_labels()
ax_2.legend(ln_1 + ln_2, labels_1 + labels_2, loc=0)
plt.grid()
fig.set_dpi(150)
The tabulated results for each sample size is shown below.
Show code cell source
from tabulate import tabulate
# --- Compile data row-wise
outputs =[]
for (
sample_size,
mean_estimate,
mean_estimate_error,
var_estimate,
var_estimate_error,
) in zip(
sample_sizes,
mean_estimates[:,0],
2.0*mean_estimates_errors,
var_estimates[:,0],
2.0*var_estimates_errors,
):
outputs += [
[
sample_size,
mean_estimate,
mean_estimate_error,
var_estimate,
var_estimate_error,
"Monte-Carlo",
],
]
header_names = [
"Sample size",
"Mean",
"Mean error",
"Variance",
"Variance error",
"Remark",
]
tabulate(
outputs,
numalign="center",
stralign="center",
tablefmt="html",
floatfmt=(".1e", ".4e", ".4e", ".4e", ".4e", "s"),
headers=header_names
)
| Sample size | Mean | Mean error | Variance | Variance error | Remark |
|---|---|---|---|---|---|
| 1.0e+01 | 2.1209e-01 | 2.8729e-01 | 1.8352e-01 | 1.4380e-01 | Monte-Carlo |
| 1.0e+02 | -2.9054e-02 | 8.4854e-02 | 1.6613e-01 | 4.1581e-02 | Monte-Carlo |
| 1.0e+03 | 8.6420e-03 | 2.8626e-02 | 1.7024e-01 | 1.1607e-02 | Monte-Carlo |
| 1.0e+04 | -9.4055e-03 | 8.1365e-03 | 1.7234e-01 | 4.1075e-03 | Monte-Carlo |
| 1.0e+05 | -8.8172e-03 | 2.5409e-03 | 1.7101e-01 | 1.3099e-03 | Monte-Carlo |
| 1.0e+06 | -1.0725e-02 | 8.2320e-04 | 1.7054e-01 | 3.8945e-04 | Monte-Carlo |
References#
Thomas J. Santner, Brian J. Williams, and William I. Notz. The design and analysis of computer experiments. Springer New York, 2018. doi:10.1007/978-1-4939-8847-1.