Piston Simulation Function#
import numpy as np
import matplotlib.pyplot as plt
import uqtestfuns as uqtf
The Piston simulation test function is a seven-dimensional scalar-valued function. The function computes the cycle time of a piston system.
This function has been used as a test function in metamodeling exercises [BAS07]. A 20-dimensional variant was used in the context of sensitivity analysis [Moo10] by introducing 13 additional inert input variables.
Test function instance#
To create a default instance of the piston simulation test function:
my_testfun = uqtf.Piston()
Check if it has been correctly instantiated:
print(my_testfun)
Function ID : Piston
Input Dimension : 7 (fixed)
Output Dimension : 1
Parameterized : False
Description : Piston simulation model from Ben-Ari and Steinberg (2007)
Applications : metamodeling, sensitivity
Description#
The Piston simulation computes the cycle time of a piston moving inside a cylinder using the following analytical expression:
where \(\boldsymbol{x} = \{ M, S, V_0, k, P_0, T_a, T_0 \}\) is the seven-dimensional vector of input variables further defined below.
Probabilistic input#
Two probabilistic input model specifications for the OTL circuit function are available as shown in the table below.
The default selection, based on [BAS07], contains seven input variables given as independent uniform random variables with specified ranges shown in the table below.
Show code cell source
print(my_testfun.prob_input)
Function ID : Piston
Input ID : BenAri2007
Input Dimension : 7
Description : Probabilistic input model for the Piston simulation model
from Ben-Ari and Steinberg (2007).
Marginals :
No. Name Distribution Parameters Description
----- ------ -------------- ----------------- ----------------------------
1 M uniform [30. 60.] Piston weight [kg]
2 S uniform [0.005 0.02 ] Piston surface area [m^2]
3 V0 uniform [0.002 0.01 ] Initial gas volume [m^3]
4 k uniform [1000. 5000.] Spring coefficient [N/m]
5 P0 uniform [ 90000. 110000.] Atmospheric pressure [N/m^2]
6 Ta uniform [290. 296.] Ambient temperature [K]
7 T0 uniform [340. 360.] Filling gas temperature [K]
Copulas : Independence
Note
In [Moo10], 13 additional inert independent input variables are introduced (totaling 20 input variables); these input variables, being inert, do not affect the output of the function.
To create an instance of the piston simulation test function
with the probabilistic input specified in [Moo10],
pass the corresponding keyword ("Moon2010")
to the parameter input_id):
my_testfun = uqtf.Piston(input_id="Moon2010")
Reference results#
This section provides several reference results of typical UQ analyses involving the test function.
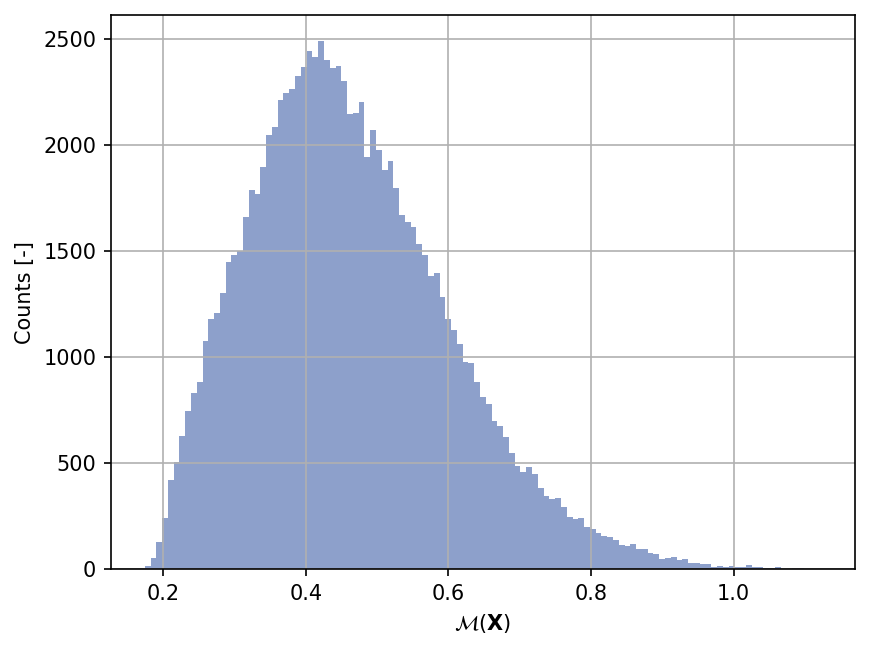
Sample histogram#
Shown below is the histogram of the output based on \(100'000\) random points:
Show code cell source
np.random.seed(42)
xx_test = my_testfun.prob_input.get_sample(100000)
yy_test = my_testfun(xx_test)
plt.hist(yy_test, bins="auto", color="#8da0cb");
plt.grid();
plt.ylabel("Counts [-]");
plt.xlabel("$\mathcal{M}(\mathbf{X})$");
plt.gcf().set_dpi(150);
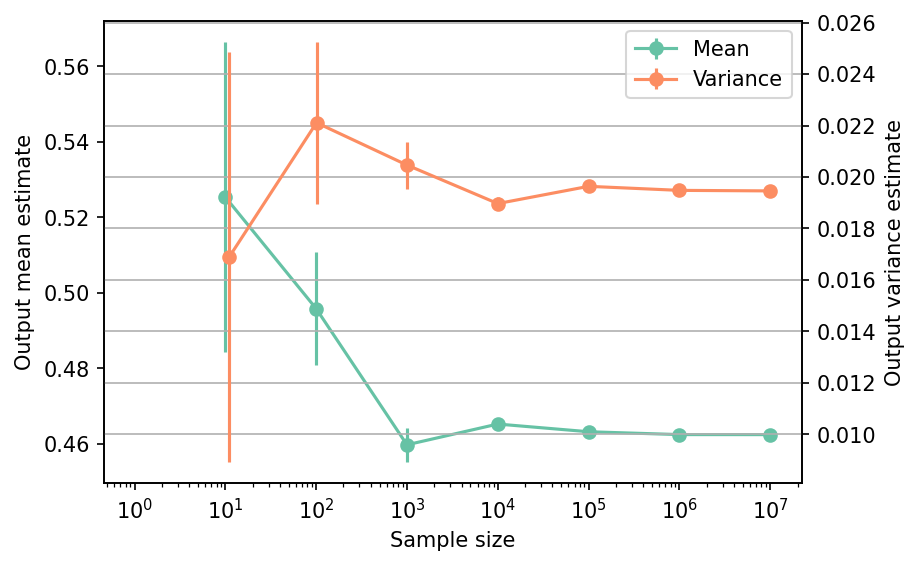
Moments estimation#
Shown below is the convergence of a direct Monte-Carlo estimation of the output mean and variance with increasing sample sizes.
Show code cell source
# --- Compute the mean and variance estimate
np.random.seed(42)
sample_sizes = np.array([1e1, 1e2, 1e3, 1e4, 1e5, 1e6, 1e7], dtype=int)
mean_estimates = np.empty(len(sample_sizes))
var_estimates = np.empty(len(sample_sizes))
for i, sample_size in enumerate(sample_sizes):
xx_test = my_testfun.prob_input.get_sample(sample_size)
yy_test = my_testfun(xx_test)
mean_estimates[i] = np.mean(yy_test)
var_estimates[i] = np.var(yy_test)
# --- Compute the error associated with the estimates
mean_estimates_errors = np.sqrt(var_estimates) / np.sqrt(np.array(sample_sizes))
var_estimates_errors = var_estimates * np.sqrt(2 / (np.array(sample_sizes) - 1))
# --- Do the plot
fig, ax_1 = plt.subplots(figsize=(6,4))
ax_1.errorbar(
sample_sizes,
mean_estimates,
yerr=mean_estimates_errors,
marker="o",
color="#66c2a5",
label="Mean",
)
ax_1.set_xlabel("Sample size")
ax_1.set_ylabel("Output mean estimate")
ax_1.set_xscale("log");
ax_2 = ax_1.twinx()
ax_2.errorbar(
sample_sizes + 1,
var_estimates,
yerr=var_estimates_errors,
marker="o",
color="#fc8d62",
label="Variance",
)
ax_2.set_ylabel("Output variance estimate")
# Add the two plots together to have a common legend
ln_1, labels_1 = ax_1.get_legend_handles_labels()
ln_2, labels_2 = ax_2.get_legend_handles_labels()
ax_2.legend(ln_1 + ln_2, labels_1 + labels_2, loc=0)
plt.grid()
fig.set_dpi(150)
The tabulated results for each sample size is shown below.
Show code cell source
from tabulate import tabulate
# --- Compile data row-wise
outputs = []
for (
sample_size,
mean_estimate,
mean_estimate_error,
var_estimate,
var_estimate_error,
) in zip(
sample_sizes,
mean_estimates,
mean_estimates_errors,
var_estimates,
var_estimates_errors,
):
outputs += [
[
sample_size,
mean_estimate,
mean_estimate_error,
var_estimate,
var_estimate_error,
"Monte-Carlo",
],
]
header_names = [
"Sample size",
"Mean",
"Mean error",
"Variance",
"Variance error",
"Remark",
]
tabulate(
outputs,
headers=header_names,
floatfmt=(".1e", ".4e", ".4e", ".4e", ".4e", "s"),
tablefmt="html",
stralign="center",
numalign="center",
)
| Sample size | Mean | Mean error | Variance | Variance error | Remark |
|---|---|---|---|---|---|
| 1.0e+01 | 5.2537e-01 | 4.1089e-02 | 1.6883e-02 | 7.9588e-03 | Monte-Carlo |
| 1.0e+02 | 4.9583e-01 | 1.4869e-02 | 2.2110e-02 | 3.1426e-03 | Monte-Carlo |
| 1.0e+03 | 4.5979e-01 | 4.5237e-03 | 2.0464e-02 | 9.1563e-04 | Monte-Carlo |
| 1.0e+04 | 4.6528e-01 | 1.3772e-03 | 1.8966e-02 | 2.6824e-04 | Monte-Carlo |
| 1.0e+05 | 4.6324e-01 | 4.4313e-04 | 1.9637e-02 | 8.7819e-05 | Monte-Carlo |
| 1.0e+06 | 4.6249e-01 | 1.3957e-04 | 1.9480e-02 | 2.7549e-05 | Monte-Carlo |
| 1.0e+07 | 4.6248e-01 | 4.4112e-05 | 1.9459e-02 | 8.7024e-06 | Monte-Carlo |
References#
Hyejung Moon. Design and analysis of computer experiments for screening input variables. PhD thesis, Ohio State University, Ohio, 2010. URL: http://rave.ohiolink.edu/etdc/view?acc_num=osu1275422248.
Einat Neumann Ben-Ari and David M. Steinberg. Modeling data from computer experiments: an empirical comparison of kriging with MARS and projection pursuit regression. Quality Engineering, 19(4):327–338, 2007. doi:10.1080/08982110701580930.